2018-08-17 click: 12187
摘要:针对齿轮测量中心的发展情况,说明了三维数字测头和测头跟踪技术产生的背景和必要性。阐述齿轮测量中心里现有的几种测头跟踪技术,并指出各种技术在实际应用中的优缺点。通过在齿轮测量中心上应用测头跟踪技术进行摆线、凸轮轴及齿轮齿根轮廓的测量,说明测头跟踪测量的实用性与先进性,此技术今后可大量应用在未知曲线测量方面。
关键词:齿轮测量中心;三维数字侧头;测头跟踪;摆线齿轮、凸轮轴测量;齿根轮廓测量
0 引言
齿轮测量中心是一种测量回转体工件类空间曲线误差项目的专用测量仪器,采用计算机和数控技术实现了测量的全部自动化。随着齿轮行业的发展,齿轮测量中心的检测目标不再是简单的测量圆柱齿轮、齿轮刀具等工件,而是提出了很多表面曲线复杂,很难甚至不能用数学公式概括的工件,无法规划测量轨迹,极大的增加了测量难度。最新发展的利用三维数字测头技术配合测头跟踪技术就是在这样的技术要求下应运而生。
1 齿轮测量中心及三维数字测头
传统的轮测量中心包括机械系统、数控系统和测量系统三部分。机械系统作为齿轮测量中心的主体,主要包括四个坐标轴:切向轴X、径向轴Y和垂直轴三个方向的直线轴,以及旋转主轴Φ。四个坐标轴都安装有光栅传感器,在运动控制指令下完成测量任务。测量系统只有切向X方向的电感传感器,可以根据齿轮的渐开线原理,以Φ轴、X轴两轴联动的形式完成齿轮误差的测量。

图1齿轮测量中心结构
随着技术的发展以及被测工件的复杂化和多样化,测量系统单一的切向测量已经不能满足需要,很多工件都需要垂直方向和径向方向的测量。所以目前齿轮测量仪器的生产商都在积极研发三维数字测头,其中哈尔滨精达测量仪器有限公司最早研发出三维数字测头,并应用测头跟踪技术完成了未知曲线的测量。三维数字测头是采用数字式光栅作为基准元件,在仪器切向(X)、径向(Y)、垂直(Z)三个方向由软件控制完成测力方向转换,根据需要依靠精密的机械实现各向互锁功能来进行配合测量,测头上也有相应的指示灯来显示正在使用哪个方向的测力来进行测量,如图1所示。三维数字测头是齿轮测量中心的最高配置,结合齿轮测量中心的四坐标轴系统,可完成各种复杂的测量任务。原则上只要测头可以够到的地方,配合相应的软件,都可以进行测量。三维数字测头具有测量精度高,测力可调范围大,方向转换灵活等优点。
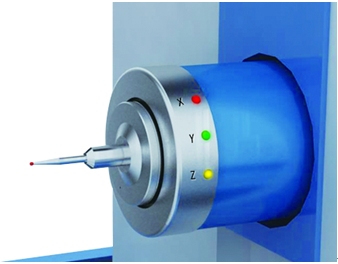
图2三维数字测头
2 测头跟踪技术
由于测头结构的限制,齿轮测量中心测头每个方向的量程都在1mm左右,在不能规划测量轨迹时,测头的量程是不能完全覆盖工件测量曲面的变化范围的,有些情况无法以传统的“标准轨迹”方法进行测量,如凸轮轴、摆线齿轮、圆柱齿轮齿根测量等情况就无法完成。测头跟踪技术是根据测头传感器采集的数据来控制机器主体各轴的运动,使测量过程中测头在量程范围之内工作,测头工作范围越小,说明跟踪的越好。根据测量中心的结构,未知曲面采用径向测量是最简单方便的方法。径向的机械结构简单,惯性相对较小,控制精度高。但对于有些法向变化大的曲线,还需要在测量过程中进行转换跟踪坐标或者二轴、三轴同时跟踪,优化跟踪控制方案,才可以取得满意效果。所以测头跟踪技术最好是与三维数字测头配合使用。哈尔滨精达公司为贵州群建设计的齿轮测量中心就是采用三维数字测头和直线电机配合测头跟踪技术实现了摆线齿轮、未知凸轮轴的测量。
测头跟踪方法有很多种,齿轮测量中心上应用的有阈值限定法,超前控制法等,还有根据电子齿轮轴轴跟踪进行测头跟踪的。但是经过实践,可以发现以上几种方法都不能达到理想的跟踪效果。阈值限定的跟踪误差在1mm之内,超前控制法的跟踪误差在0.3mm以内。运动控制卡自带的电子齿轮功能也可以实现轴轴跟踪,但由于运动控制卡的限制,经常在某些条件下无法完成跟踪任务,如在凸轮轴测量过程中,若在最大值点附近开始检测,且测量速度稍大,就无法完成跟踪任务。可见其对测量速度的要求很高。
精达公司的测头跟踪技术,采用基于无模型自适应外环补偿的鲁棒滑模控制方法,实现了测头的完美跟踪。虽然滑模控制方法已经广泛地应用在很多领域,但值得注意的是,从本质上讲滑模控制方法是以被控对象的数学模型为基础建立的。众所周知,在实际中无论采用何种建模或者辨识方法,未建模特性和模型不确定性等因素总是存在并且可能会使基于该模型设计的控制系统的闭环性能变差甚至出现振荡或发散的情况。与传统的基于被控对象数学模型的控制方法不同,无模型自适应控制是一种建立在被控系统输入和输出数据基础上的控制技术。与传统基于模型的控制方法相比,无模型自适应技术具有以下优点[1]:
1) 以被控系统的输入输出数据为基础,无需任何系统先验知识;
2) 无需在线或者离线的训练过程;
3) 计算量较小、结构简单且容易实现。
无模型自适应外环补偿控制的主要设计步骤如下:
1) 在每个采样点建立等效动态线性化模型;
2) 通过系统的输入输出数据对伪偏导进行估计;
3) 通过选择适当的准测函数设计无模型自适应控制律。
带有无模型自适应外环补偿的工鲁棒滑模控制系统结构如图3、图4所示。
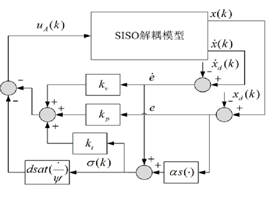
图3鲁棒滑模控制器结构示意图

图4带有无模型自适应外环补偿的鲁棒滑模控制结构示意图
对于离散非线性系统,考虑控制准则函数

基于CFDL的无模型自适应控制律为

为实现式(2)表示的无模型自适应控制,需要利用时变伪偏导  。但由于被控系统的模型未知,所以
。但由于被控系统的模型未知,所以  的精确值无法获得。因此,需要利用系统的输入和输出数据近似估算
的精确值无法获得。因此,需要利用系统的输入和输出数据近似估算  。设计了一种伪偏导估计准则函数
。设计了一种伪偏导估计准则函数

其中,  为
为  的估计值;μ >0为权重系数。
的估计值;μ >0为权重系数。
对上式关于  求极值,则
求极值,则  的估计算法可以表示为
的估计算法可以表示为

其中,η∈(0,1]为补偿因子。权重系数μ的作用不是通常意义上的防止出现奇点,而是调节  的估计变化速度。
的估计变化速度。
总结前述伪偏导估计方法(4)和控制算法(2),无模型自适应控制方案为:
 ,如果
,如果 或者,
或者, ,其中,
,其中,  为足够小的正数,
为足够小的正数,  为
为  的初值。
的初值。
采用无模型自适应外环补偿的鲁棒滑模控制方法进行测头跟踪,跟踪误差可以达到0.02mm以内。
3.1 凸轮轴测量
凸轮轴是发动机、机油泵等机构里关键零件。对于凸轮轴这样的工件在齿轮测量中心进行测量时,利用齿轮测量中心独有的精密回转轴系,最方便的测量方式是采用极坐标测量方式,而极坐标测量时,仪器径向坐标在测量控制过程中,由于与回转主轴的运动非线性,或者根本无法预知运动轨迹,利用前述测头跟踪技术很容易实现测量,对回转圆光栅、径向光栅及三维测头径向光栅进行数据采集处理,得到极坐标的测量数据,并可进一步进行误差处理,得到如凸轮轴升程误差等项目。凸轮轴测量结果如下:
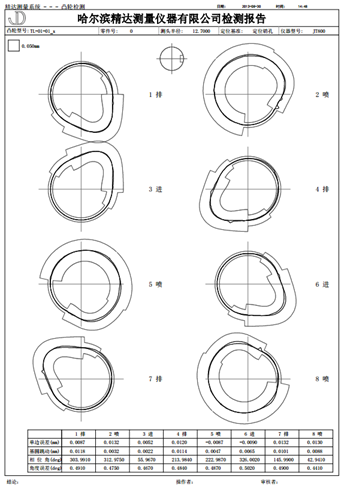
图5凸轮轴测量报告单
3.2 摆线齿轮测量
摆线齿轮作为RV减速器的关键部件,是目前行业最热门的齿轮研究对象,由于摆线齿轮传动过程需要进行修形设计制造,以利于传动,同时,为提高摆线齿轮副传动精度,减少机构“背隙”,RV机构中的摆线齿轮要求很高的制造精度。同理,在齿轮测量中心上,锁定三维测头的切向及垂直方向,主轴转动,仪器径向通过三维测头的径向测微功能,实现仪器径向对主轴的测头跟踪控制,采用极坐标测量方式,对齿轮误差进行全量数据采集及误差处理,完成摆线齿廓的测量,测量结果如下:
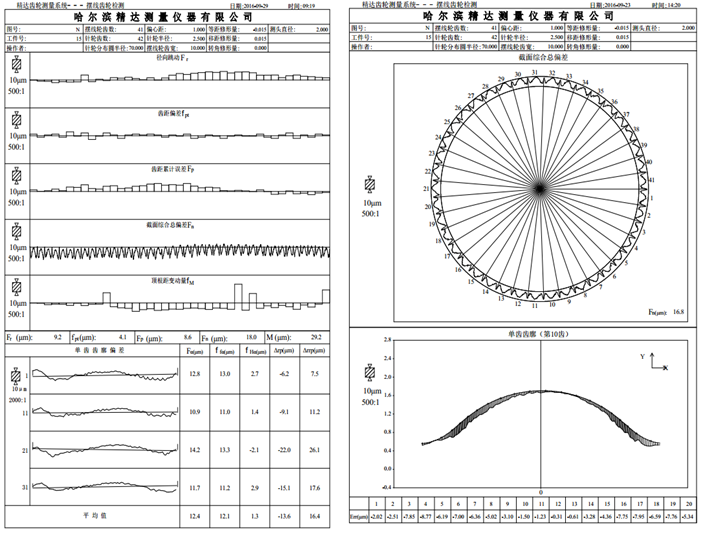
图6摆线齿轮测量报告1 图7摆线齿轮测量报告2
3.3 齿根轮廓测量
齿轮根部测量作为齿轮测量中心的扩展的辅助功能,随着对齿轮制造质量的提高,越来越得到一些客户的重视,齿轮根部不参与齿轮啮合,不影响传动质量,但是,由于“滚剃”、“滚磨”制造齿轮工艺,会产生加工结合部的台阶过渡,会在齿轮使用过程中产生应力集中,影响齿轮受力情况。由于齿根曲线的不确定性,在传统的齿轮齿廓测量中,齿根部分是无法测量的。由于齿轮齿根部分无法用确切的数学公式表达,属于一种未知曲面。而采用本文所论述的测头跟踪技术实现任意“未知轮廓扫描”功能,可以很好的完成齿轮根部扫描测量,丰富、提升了齿轮测量功能。齿轮轮廓测量结果如下:
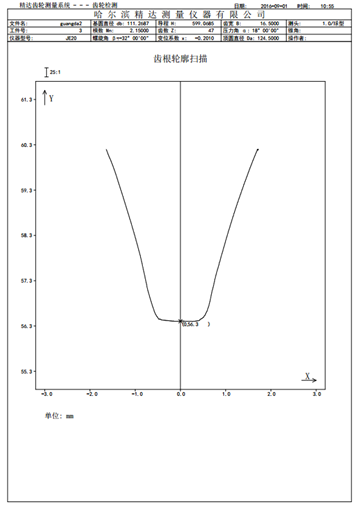
图8齿轮齿根轮廓打印报告
齿轮测量中心最早是针对圆柱齿轮测量发展起来的最新一代齿轮量仪,测量原理是采用标准轨迹精确控制形成所需要测量的空间标准理论轨迹曲线,由测微测头进行误差采集后进行误差处理,完成所需要的误差项目的测量。
在标准轨迹控制的基础上,增加测头跟踪技术,除上述方面的应用外,还可大为扩展齿轮测量中心的应用功能:
(1)未知齿轮辅助测绘功能,提高测量效率;
(2)弥补大规格粗加工齿轮,标准轨迹法误差超出测微测头传感器量程时无法测量的不足;
(3)大模数滚刀“凸头”的测量;
(4)各种未知轮廓、形位误差项目的测量。
本文针对齿轮测量中心的三维数字测头和测头跟踪技术的必要性进行了分析和阐述,并通过实际应用展示了测头跟踪技术的优势,实际上利用测头跟踪技术可以对任意未知曲线进行测量,这不仅解决了特殊齿轮测量问题,还增加了齿轮测量中心测量的灵活性,更是为比较测量方法的产生奠定了技术基础,让齿轮测量向个性化测量的发展方向迈出了一大步。
[1] Hou Z, Jin S. Model free adaptive control: theory and applications[M]. CRC
press, 2013.
[2] 周广才 《齿轮坐标测量系统及齿轮坐标测量方法的研究》天津大学 硕士论文,1993.3
上一篇 重 要 声 明

